
VLA · World Models · Robotic Systems
Building the intelligence layer for physical robots.
I lead work on vision-language-action systems, world-state modeling, and production autonomy stacks that connect perception, planning, prediction, and action.
2026 - Present
Building VLA and world model systems for embodied robots.
01 · XLab · Embodied Intelligence
At XLab, my work focuses on embodied intelligence: using VLA policies, world-state modeling, multimodal perception, and closed-loop action generation to build robot systems that can understand, predict, and act in physical environments.
XLab embodied intelligence media reference.
2024 - 2026
VLA / XPlanner for robotic decision and action.
02 · Robot Policy
At XPeng Motors, I led and core-contributed to vehicle-side VLA/XPlanner systems: route-video-to-trajectory modeling, large-model scaling, dynamic interaction, and complex-scenario action generation. I think of this as robot policy learning under real product constraints.
2021 - 2024
Model the world before taking action.
03 · World Models
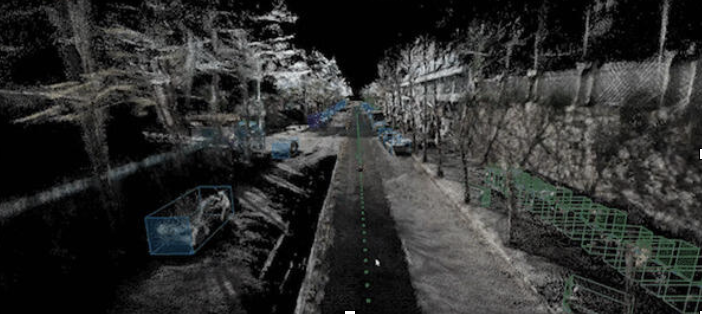
My prior work at DJI Automotive focused on BEV perception, dynamic object detection, tracking fusion, occupancy-style scene understanding, and 4D annotation loops. These are the ingredients for world-state modeling in deployed robot systems.

2018 - 2021
3D vision as the sensorimotor substrate.
04 · Perception Foundation
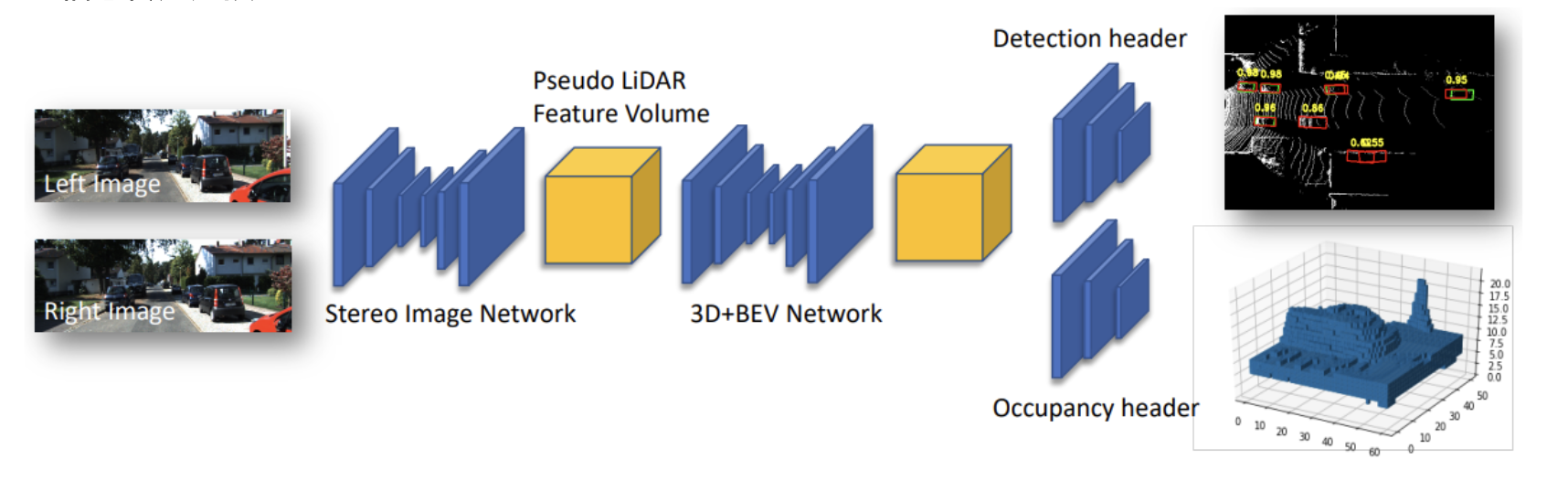
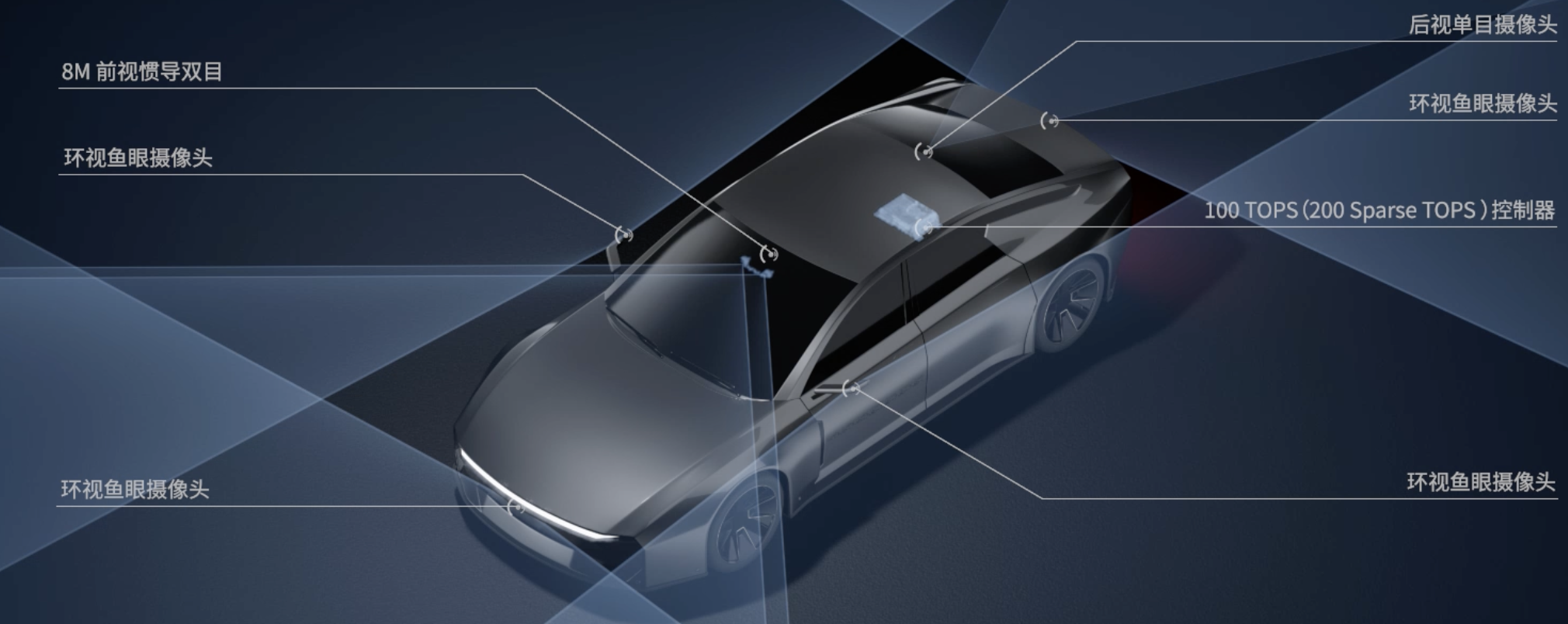
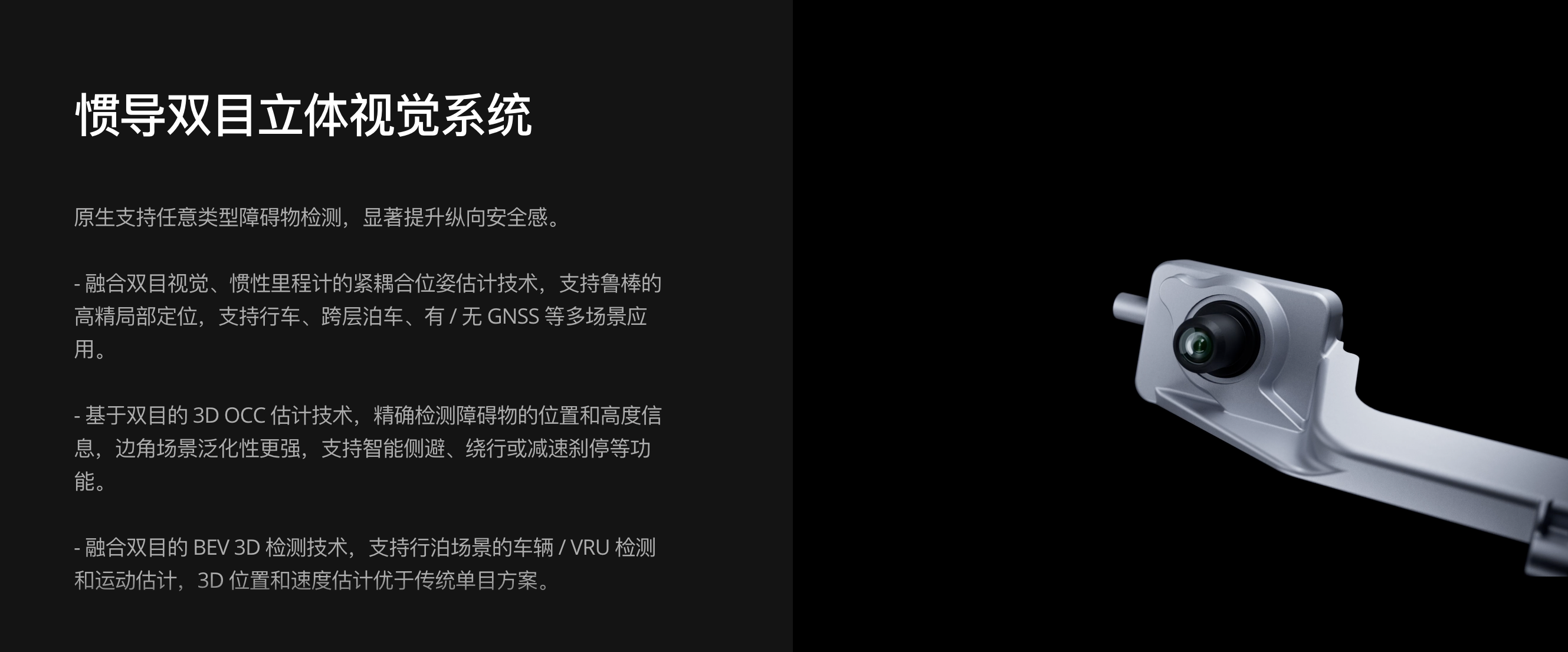
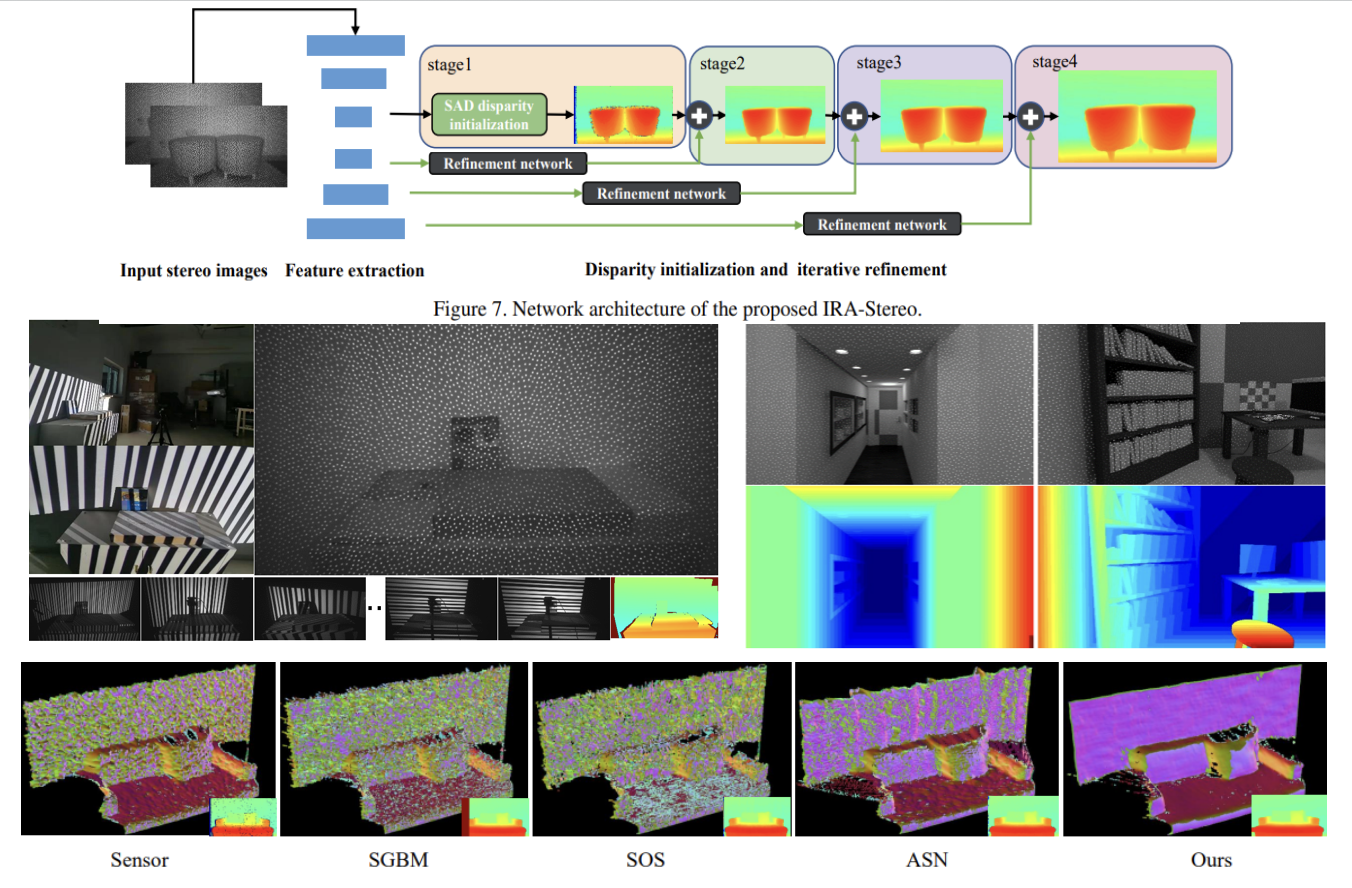
I built and maintained practical stereo and depth systems, including X-StereoLab with 600+ stars and 100+ forks. Stereo matching, active stereo, RGB-D understanding, and road-structure perception form the lower-level grounding for robot intelligence.
Mission
Build general, reliable physical AI robot systems.
My goal is to build robot intelligence that can generalize across physical environments, deploy at real-world scale, and continuously improve through closed-loop data, world models, and self-evolving iteration.

Visitors